Network Time Protocol (NTP) Version 3 – Brief Introduction
Posted on |
Network Time Protocol (NTP) Version 3 – Brief Introduction
The Network Time Protocol (NTP) Version 3, is used to synchronize timekeeping among a set of distributed time servers and clients. It defines the architectures, algorithms, entities, and protocols used by NTP and is intended primarily for implementors. A companion document [MIL91a] summarizes the requirements, analytical models, algorithmic analysis and performance under typical Internet conditions. Another document [MIL91b] describes the NTP timescale and its relationship to other standard timescales now in use.
NTP was first described in RFC-958 [MIL85c], but has since evolved in significant ways, culminating in the most recent NTP Version 2 described in RFC-1119 [MIL89]. It is built on the Internet Protocol (IP) [DAR81a] and User Datagram Protocol (UDP) [POS80], which provide a connectionless transport mechanism; however, it is readily adaptable to other protocol suites. NTP is evolved from the Time Protocol [POS83b] and the ICMP Timestamp message [DAR81b], but is specifically designed to maintain accuracy and robustness, even when used over typical Internet paths involving multiple gateways, highly dispersive delays, and unreliable nets.
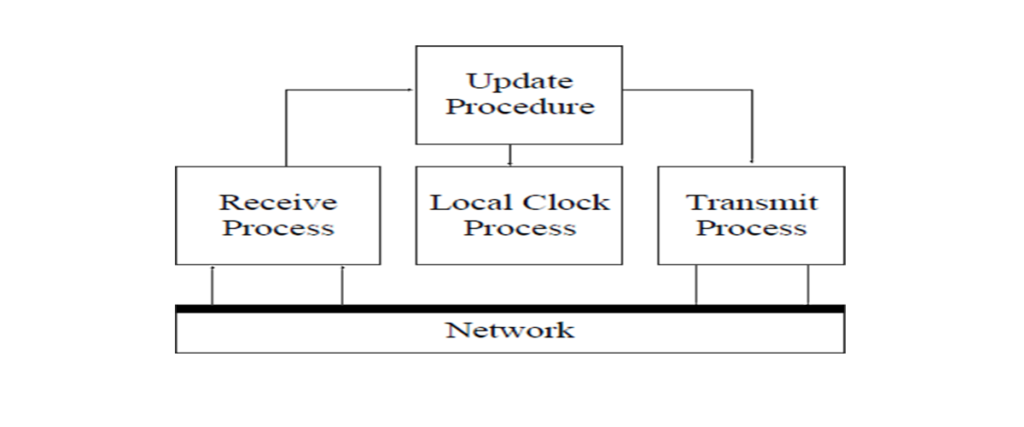
The service environment consists of the implementation model and service model described in Section 2. The implementation model is based on a multiple-process operating system architecture, although other architectures could be used as well. The service model is based on a returnable-time design which depends only on measured clock offsets but does not require reliable message delivery. The synchronization subnet uses a self-organizing, hierarchical-master-slave configuration, with synchronization paths determined by a minimum-weight spanning tree. While multiple masters (primary servers) may exist, there is no requirement for an election protocol.
NTP provides the protocol mechanisms to synchronize time in principle to precisions in the order of nanoseconds while preserving a non-ambiguous date well into the next century. The protocol includes provisions to specify the characteristics and estimate the error of the local clock and the time server to which it may be synchronized. It also includes provisions for operation with a number of mutually suspicious, hierarchically distributed primary reference sources such as radio-synchronized clocks.
Section 4 describes algorithms useful for deglitching and smoothing clock-offset samples collected on a continuous basis. These algorithms evolved from those suggested in [MIL85a], were refined as the results of experiments described in [MIL85b] and further evolved under typical operating conditions over the last three years. In addition, as the result of experience in operating multiple server subnets including radio clocks at several sites in the U.S. and with clients in the U.S. and Europe, reliable algorithms for selecting good clocks from a population possibly including broken ones have been developed.
The accuracies achievable by NTP depend strongly on the precision of the local-clock hardware and stringent control of device and process latencies. Provisions must be included to adjust the software logical-clock time and frequency in response to corrections produced by NTP. A local-clock design evolved from the Fuzzball implementation described in [MIL83b] and [MIL88b]. This design includes offset-slewing, frequency compensation and deglitching mechanisms capable of accuracies in the order of a millisecond, even after extended periods when synchronization to primary reference sources has been lost.
Related Technology
Other mechanisms have been specified in the Internet protocol suite to record and transmit the time at which an event takes place, including the Daytime protocol [POS83a], Time Protocol [POS83b], ICMP Timestamp message [DAR81b] and IP Timestamp option [SU81].
The Digital Time Service (DTS) [DEC89] has many of the same service objectives as NTP. The DTS design places heavy emphasis on configuration management and correctness principles when operated in a managed LAN or LAN-cluster environment, while NTP places heavy emphasis on the accuracy and stability of the service operated in an unmanaged, global internet environment. In DTS a synchronization subnet consists of clerks, servers, couriers and time providers. With respect to the NTP nomenclature, a time provider is a primary reference source, a courier is a secondary server intended to import time from one or more distant primary servers for local redistribution and a server is intended to provide time for possibly many end nodes or clerks. Unlike NTP, DTS does not need or use mode or stratum information in clock selection and does not include provisions to filter timing noise, select the most accurate from a set of presumed correct clocks or compensate for inherent frequency errors.
In fact, the latest revisions in NTP have adopted certain features of DTS in order to support correctness principles. These include mechanisms to bound the maximum errors inherent in the time-transfer procedures and the use of a provably correct (subject to stated assumptions) mechanism to reject inappropriate peers in the clock-selection procedures.
The Fuzzball routing protocol sometimes called Hellospeak incorporates time synchronization directly into the routing-protocol design. One or more processes synchronize to an external reference source, such as a radio clock or NTP daemon, and the routing algorithm constructs a minimum-weight spanning tree rooted in these processes. The clock offsets are then distributed along the arcs of the spanning tree to all processes in the system and the various process clocks corrected using the procedure. While it can be seen that the design of Hellospeak strongly influenced the design of NTP, Hellospeak itself is not an Internet protocol and is unsuited for use outside its local-net environment.
The Unix 4.3bsd time daemon timed [GUS85a] uses a single master-time daemon to measure offsets of a number of slave hosts and send periodic corrections to them. In this model, the master is determined using an election algorithm [GUS85b] designed to avoid situations where either no master is elected or more than one master is elected. The election process requires a broadcast capability, which is not a ubiquitous feature of the Internet. While this model has been extended to support hierarchical configurations in which a slave on one network serves as a master on the other [TRI86], the model requires handcrafted configuration tables in order to establish the hierarchy and avoid loops. In addition to the burdensome, but presumably infrequent, overheads of the election process, the offset measurement/correction process requires twice as many messages as NTP per update.
A scheme with features similar to NTP is described in [KOP87]. This scheme is intended for multi-server LANs where each of a set of possibly many time servers determines its local-time offset relative to each of the other servers in the set using periodic timestamped messages, then determines the local-clock correction using the Fault-Tolerant Average (FTA) algorithm of [LUN84]. The FTA algorithm, which is useful where up to k servers may be faulty, sorts the offsets, discards the k highest and lowest ones and averages the rest. The scheme, as described in [SCH86], is most suitable to LAN environments which support broadcast and would result in unacceptable overhead in an internet environment.
A good deal of research has gone into the issue of maintaining accurate time in a community where some clocks cannot be trusted. A truechimer is a clock that maintains timekeeping accuracy to a previously published (and trusted) standard, while a falseticker is a clock that does not. Determining whether a particular clock is a truechimer or falseticker is an interesting abstract problem which can be attacked using agreement methods summarized in [LAM85] and [SRI87].
A convergence function operates upon the offsets between the clocks in a system to increase the accuracy by reducing or eliminating errors caused by falsetickers. There are two classes of convergence functions, those involving interactive-convergence algorithms and those involving interactive-consistency algorithms. Interactive-convergence algorithms use statistical clustering techniques such as the fault-tolerant average algorithm of [HAL84], the CNV algorithm of [LUN84], the majority-subset algorithm of [MIL85a], the non-Byzantine algorithm of [RIC88], the egocentric algorithm of [SCH86], the intersection algorithm of [MAR85] and [DEC89].
Interactive-consistency algorithms are designed to detect faulty clock processes which might indicate grossly inconsistent offsets in successive readings or to different readers. These algorithms use an agreement protocol involving successive rounds of readings, possibly relayed and possibly augmented by digital signatures.
In practice, it is not possible to determine the truechimers from the falsetickers on other than a statistical basis, especially with hierarchical configurations and a statistically noisy Internet. While it is possible to bound the maximum errors in the time-transfer procedures, assuming sufficiently generous tolerances are adopted for the hardware components, this generally results in rather poor accuracies and stabilities. The approach taken in the NTP design and its predecessors involves mutually coupled oscillators and maximum-likelihood estimation and clock-selection procedures, together with a design that allows provable assertions on error bounds to be made relative to stated assumptions on the correctness of the primary reference sources. From the analytical point of view, the system of distributed NTP peers operates as a set of coupled phase-locked oscillators, with the update algorithm functioning as a phase detector and the local clock as a disciplined oscillator, but with deterministic error bounds calculated at each step in the time-transfer process.
The clock filter and selection algorithms are designed so that the clock synchronization subnet self-organizes into a hierarchical-master-slave configuration [MIT80]. With respect to timekeeping accuracy and stability, the similarity of NTP to digital telephone systems is not accidental, since systems like this have been studied extensively [LIN80], [BRA80]. What makes the NTP model unique is the adaptive configuration, polling, filtering, selection and correctness mechanisms which tailor the dynamics of the system to fit the ubiquitous Internet environment.
Reference: RFC 1305, Network Time Protocol (Version 3)
Books you may interested
 |  |  |
